
As technology advances, point cloud data, as a new type of data format, has demonstrated its powerful application value in various fields. So, what is point cloud data? How is it generated? And what conveniences can it bring to our lives and work?
1. What is a 3D Point Cloud
A 3D point cloud is a data structure used to represent objects or scenes in three-dimensional space. In its most basic form, it is a collection of multiple three-dimensional coordinate points (X, Y, Z). A point cloud is a set of data points in space that contain rich information, including three-dimensional coordinates X, Y, Z, color, classification values, intensity values, time, and more. Point clouds are massive collections of points that express the spatial distribution and surface characteristics of the target in the same spatial reference frame. Point clouds are generally obtained by 3D scanners, which measure many points on the external surface of objects or around these objects. These points are acquired through discrete sampling of the actual object or scene surface, so point clouds can be seen as a discrete representation of the scene surface in a given coordinate system.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
 文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
2. Main Characteristics
1. High Flexibility: Point clouds can represent any type of three-dimensional shape, including irregular shapes;文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
2. Variable Data Density: The density of point clouds can vary greatly, from containing just a single point (known as an outlier or singularity) to high-density point clouds with millions of data points;文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
3. Rich Additional Information: In addition to basic three-dimensional coordinates, point cloud data may also contain other attributes such as color, classification values, intensity values, and time.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
3. Generation of Point Cloud Data
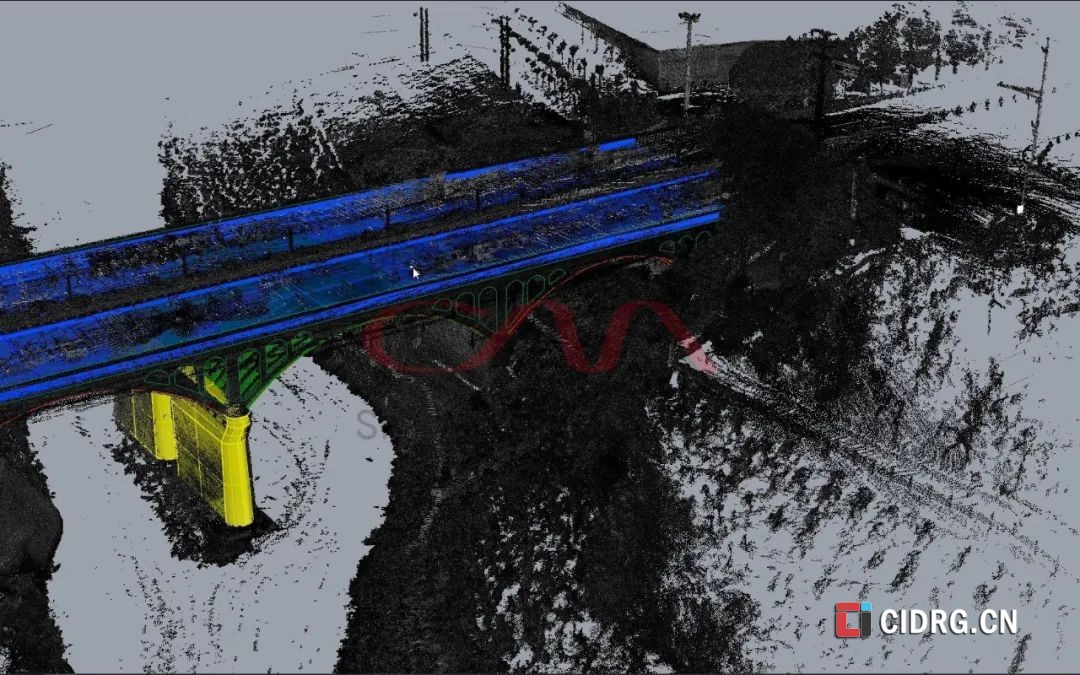
Point cloud data is generated through technologies such as 3D laser scanning and structured light, which involve extensive and dense measurements of the surface of objects to obtain three-dimensional coordinate data. When we scan a building surface with a 3D laser scanner, we obtain a large number of dense points, which carry information such as three-dimensional coordinates (XYZ), laser reflection intensity, and color information (RGB), collectively creating a recognizable three-dimensional structure. In simple terms, when we use these high-tech devices to scan objects, the device emits laser beams or structured light, and by measuring the intersection points of the laser or light with the object's surface, we obtain point cloud data of the object’s surface.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
A point cloud is a massive collection of points representing the characteristics of the target surface; the denser the point cloud, the more detailed the reflected image and information.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
4. Applications of Point Cloud Modeling
Point clouds have very broad applications in 3D modeling, and here are several main application areas:文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
1. 3D Reconstruction and Modeling: This is one of the most direct applications of point cloud technology. By capturing real-world point cloud data and processing it with reality modeling software like ContextCapture, realistic 3D scene models can be generated. These models can be used in virtual reality, game development, simulation training, etc. For example, in virtual reality games, point cloud data can be used to create highly realistic virtual environments.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html
2. Terrain and Landform Reconstruction: Point cloud technology can be used for 3D reconstruction of terrain and landforms. By obtaining point cloud data of the ground through laser scanning or airborne LiDAR, and then processing and analyzing the point cloud data to extract terrain features and landform information, high-precision terrain models can be generated for applications such as land planning and hydrological analysis.文章源自CIDIGITAL-https://www.cidrg.cn/en/knowledge/468.html

3. Engineering Modeling: In construction engineering, point cloud data obtained using laser scanners can be used with reality modeling software like ContextCapture to generate 3D models of buildings. These models can be used for engineering design and analysis, such as structural assessment and collision detection.
4. Medical Imaging and Human Modeling: In the medical field, point cloud reconstruction can be used for processing medical imaging data such as CT and MRI scans. Through point cloud reconstruction, accurate medical diagnoses and surgical planning can be achieved. Additionally, point cloud technology can be used for human modeling, such as creating customized prosthetics or orthotics.
5. Object Detection and Recognition: In autonomous driving and robot navigation, point cloud data can be used to detect and recognize objects in the environment. By processing and analyzing point cloud data, accurate information about the object's location, shape, and posture can be obtained, enabling precise positioning and navigation.
6. Cultural Heritage Preservation: Point cloud technology can be used for the 3D reconstruction and preservation of cultural relics and monuments. By obtaining point cloud data of artifacts or historical sites through laser scanning or photogrammetry, and then processing and analyzing the data to assess geometric features and attributes, 3D models of relics or monuments can be reconstructed for protection, display, and research.

7. Industrial Design and Manufacturing: In the industrial field, point cloud technology can be used for industrial design and manufacturing. By obtaining point cloud data of industrial products or components through laser scanning or optical measurement, and then processing and analyzing the data to extract feature information, the design, inspection, and manufacturing of products or components can be achieved.
The technology involved in point clouds is very extensive, including but not limited to the following:
1. Point Cloud Filtering: This is an important step in data preprocessing, mainly to remove noise and other unwanted data. There are many methods for point cloud filtering, such as bilateral filtering, Gaussian filtering, conditional filtering, pass-through filtering, random sample consensus filtering, VoxelGrid filtering, etc.
2. Keypoint Extraction: Keypoints are feature extraction algorithms commonly used in 2D images and can be extended to 3D space. Common 3D point cloud keypoint extraction algorithms include ISS3D, Harris3D, NARF, SIFT3D, etc.
3. Feature and Descriptor Calculation: In addition to keypoints, point cloud data also requires the calculation of additional parameters such as normal direction, curvature, texture features, etc. These feature description algorithms include normal and curvature calculation, feature value analysis, PFH, FPFH, 3D Shape Context, Spin Image, etc.
4. Point Cloud Registration: This is the process of aligning multiple point cloud datasets. Common registration algorithms include the Iterative Closest Point (ICP) and Normal Distributions Transform (NDT) algorithms.
5. SLAM Graph Optimization: In SLAM technology, point cloud data needs to be optimized using graph optimization tools. Common tools include g2o, LUM, ELCH, etc.
6. Object Recognition and Retrieval: This is an application-layer problem in point cloud data processing, often using Hausdorff distance for deep image object recognition and retrieval.
7. Change Detection: In unordered point clouds, octree algorithms are often used to detect changes, combined with keypoint extraction techniques.
8. 3D Reconstruction: Obtaining entire surfaces from isolated point cloud data. Common 3D reconstruction algorithms and techniques include Poisson reconstruction, Delaunay triangulation surface reconstruction, etc.
9. Point Cloud Data Management: This includes point cloud compression, point cloud indexing (KDtree, Octree), point cloud Level of Detail (LOD) (pyramid), etc., for rendering massive point clouds.
10. Point Cloud Segmentation and Classification: This is the basis for object recognition, with segmentation methods including region extraction, line and surface extraction, semantic segmentation, and clustering. Classification includes point-based classification and segmentation-based classification.
5. Methods and Processes of Point Cloud Data Modeling
Point cloud data modeling refers to the process of constructing 3D models using point cloud data. The main application scenarios of point cloud data modeling include building modeling, terrain surveying, cultural heritage preservation, industrial inspection, medical image analysis, and more.

Methods of Point Cloud Data Modeling include but are not limited to the following:
1. Surface Reconstruction Methods: Generating surface models from point cloud data. Common algorithms include Delaunay triangulation, Ball Pivoting, etc.
2. Interpolation Methods: Performing interpolation calculations on point cloud data to generate continuous surface models. Common algorithms include Moving Least Squares (MLS), spline interpolation, etc.
3. Volumetric Modeling Methods: Constructing three-dimensional voxel models from point cloud data. Common algorithms include voxelization, octree, etc.
The process of converting point cloud data into 3D models usually includes the following steps:
1. Data Collection: Using laser scanners, 3D cameras, and other devices to collect point cloud data.
2. Data Preprocessing: Removing noise and filtering the original point cloud data to eliminate errors and redundant information. During 3D laser scanning, point cloud data acquisition is often affected by object occlusions and uneven lighting, leading to scan blind spots. By filtering and preprocessing, we can correct these inaccuracies.
3. Registration: Aligning multiple point cloud datasets from different perspectives to form a complete model.
4. Reconstruction: Using surface reconstruction, interpolation, and volumetric modeling methods to generate a 3D model from the aligned point cloud data.
5. Post-Processing: Refining the reconstructed model, including smoothing, optimizing, and converting into other formats for application.
6. Conclusion
Point cloud data modeling provides powerful tools for digitizing and visualizing three-dimensional objects and scenes. Its application is widely used in various fields and offers significant benefits. As point cloud technology continues to evolve, the scope and precision of its applications are bound to expand further, making it an essential tool for future technology advancements.
The various methods and technologies discussed are crucial for effectively leveraging point cloud data to meet different needs. As this technology advances, its applications will become even more widespread and sophisticated.


